


 Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnboard giống như trong hình này ạ!


 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.


Mình có mua cái B.O.B usb của chị na giá 1tr150. Thầy mình yêu cầu gắn thêm encoder vào sau mâm cặp để kiểm soát trong quá trình tiện ren. Nhưng mình chỉ biết là cần khai báo Index nhưng chưa biết phải khai báo thế nào và kết nối với chân nào trong board. Cũng đã thử nhiều cách nhưng chưa thành công. Mong các anh/bạn giúp đỡ. Xin cảm ơn nhiều!
board giống như trong hình này ạ!



Bob này đâu có kết nối encoder đc đâu nhỉ. Nếu có chắc chỉ có cụm Jack đen 10 chân vốn thiết kế dùng handwheelGửi bởi Vampirate


Chưa thử nhưng với board này e là không được.
1. Board này cho kết nối enc để làm MPG, không phải là enc để kiển soát trục.
2. Indexer để đo tốc độ trục chính là high speed, nhưng các input của board này thì tốc độ không cao nên không chắc.
Nếu nối được thì nó cũng thông qua các ngỏ input mà thôi.
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
tiện ren trên mach 3 thì chỉ cần 1 con sensor lắp trên trục chính mâm cặp là đủ mừ.
Quan trọng là cái BOB nó không hổ trợ in put tốc độ cao.
Mấy cái độ chế, nếu cần tính năng nào ngoài 3 trục XYZ thì hầu như các BOB Mach3 đều rất yếu kém. Vì nó chạy qua plug-in trung gian, nên không phải cái gì Mach3 LPT làm được thì cái ÚB nó cũng làm được.
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
lúc trước em có xài ecut vẫn tiện ren đc, chỉ có điều usb nhiễu ngẫu nhiên nên thôi.
Cảm ơn các bạn đã quan tâm nha! Vậy có bạn nào biết B.O.B nào kết nối được không chỉ giúp mình với. Vì B.O.B dùng cổng USB hay LPT đa số đều có opto cách ly ở Input.
Cảm ơn!
Vậy có board nào kết nối enc hoặc hall effect sensor đc không nhờ anh chỉ giúp em.
Cảm ơn anh!
Xin cảm ơn mọi người!!
Kết nối để làm gì?
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM

BOB cổng LPT nào cũng có thể kết nối được không nhất thiết phải là rotary encoder, để tiện được ren chỉ cần một cảm biến là đủ
ĐT : 0979155342 - web: www.cnc.uyhan.com, www.facebook.com/cokhiuyhan
BoB có kết nối encoder thì có đó nhưng hình như người ta ko gọi là BoB mà là controller. Cái này mắc lắm, nó đọc tín hiệu hồi tiếp encoder từ driver rồi bù trừ các kiều. Nói chung nó ngon hơn xài BoB (distributed control system) nhiều vì vòng kín từ đầu đến đít -> centralized control system. Hình như diễn đàn nhiều bác có điều kiện toàn chơi hàng này")
HCM , 0945 ba nhăm 3577
Đ/Chỉ, STK: SMS để biết thêm chi tiết. Tks
Để tiện ren thì... có 2 cách mà theo mình là có thể làm với mach3.
1. Dùng indexer. Nhiệm vụ đồng bộ tốc độ của trục chính và tốc độ tiến bàn XZ. Indexer tối thiểu chỉ cần 1 xung cho 1 vòng, có thể nhiều hơn thì chính xác hơn. Nhưng không phải nhiều bao nhiêu cũng được. Input mach3 khá chậm, nên nếu vượt quá tần số cho phép thì nó đơ luôn. Ngoài ra để chính xác hơn cần điều chỉnh nhã năng đáp ứng của trục chính với mach3 qua việc config VFD và speed PID trong mach3.
2. Dùng servo và chạy luôn chế độ step/dir. Cách này theo mình hơi tốn kém nhưng ngon nhất. Chạy kiểu này thì khogo cần đến indexer vẫn chính xác như thường vì mach3 nó kiểm soát tốt trục chính rồi.
Muốn chơi tốt trò indexer thì dùng BOB LPT là đơn giản nhất. Muốn dùng qua BOB USB thì phải xem BOB có hổ trợ không. Vì lúc này BOB quản lý tốc độ thông qua plugin chứ mach3 không can thiệp trực tiếp nữa. Nếu mach3 có can thiệp thì tín hiệu cũng bị trễ khá nhiều với các input.
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
Mach3 chỉ nhận xung index, linux nhận 2 xung A và B, tối đa 100 xung. Mình thấy thằng linux tiện ren ngon hơn mach3 nếu chỉ sài BOB thường.
Mach3 vẫn chạy tốt cũng chẳng cần config PID chuẩn đâu bác, tại vì muốn chuẩn cũng khó, mà quan trọng nhất là spindle phải đủ tải để tiện được tốc độ chậm thôi.
Thanks.
Hiếu: 0938 995 818
Hộp số Harmonic , Trục A, combo các loại.
Em có gắn thử 1 hall effect sensor lên trục chính,khai báo Index ở chân Input,khi quay thử bằng tay thì tín hiệu Index nhận đều đều (nhưng vẫn không hiển thị tốc độ), còn khi điều khiển quay bằng biến tần thì mất xung luôn.lâu lâu Index mới hiển thị nhận một lần. Có lẽ board này chắc không nhận xung tần số cao được hoặc khai báo còn thiếu sót chỗ nào mà mach3 không hiển thị RPM đc nên nhờ anh chị trong diễn đàn tư vấn giúp em.
Em cảm ơn!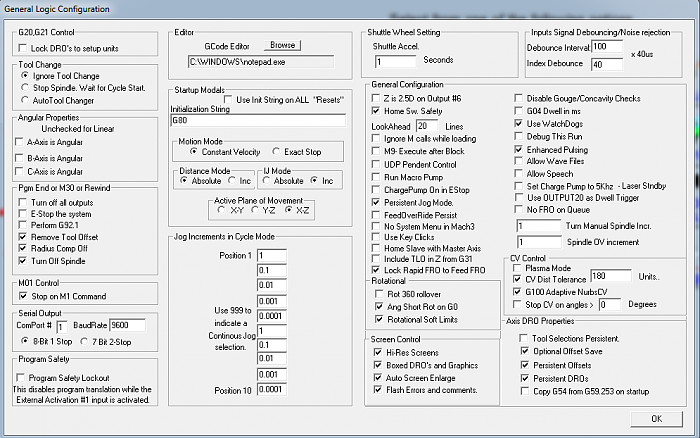
Xin cảm ơn mọi người!!
 Quyền viết bài
Quyền viết bài