Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnOk, cố gắng sớm show hàng.
Thanks

 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.


vậy hả ? bác ngâm cứu nhanh nhanh , có nhiều bác hỏi em cái vụ này mà em chưa làm nên không dám phán ì xèo , chơi 1 dao thì ok , nhưng gá dao xong , set toạ độ , kiểm tra độ lệch của mũi dao so với toạ độ gốc sau đó mới lấy dữ liệu đó đưa vào chương trình đi dao ... hơi ngược 1 tí nhưng vẫn đi dao tốt , ông anh ruột dùng powermill đi dao chứ em thì không biết , chỉ chuẩn bị phần cơ khí cho ổng thôi.
---- Thấy hành trình Z là 190mm , như thế vẫn là còn thấp so với kết cấu router 5 Axis , vậy thì bác chỉ làm được đồ be bé thôi.
---- Nhờ bác chụp hình đưa lên đây cho xôm tụ , biết đâu các cao thủ khác nhào vô thì dự án xong sớm , và anh em cũng lót dép học hỏi được nhiều trong đó có em.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648

Ok, cố gắng sớm show hàng.
Thanks

Cả nhà cho em hỏi ké vào thớt này chút ạ. Bên em hay phải tiện chân tăng chỉnh cho máy, đại khái nó là tiện cái ren như thế này:
Em thấy trong mach3 có phần wizard cho phay ren, đại ý là dựng đứng cái trục cần tiện ren trên bàn máy, rồi đầu phay quay xung quanh phay cái ren cho cái trục ý ạ.
Liệu cái chân máy này có phay ren được như vậy không ạ ? Chân này nếu tiện thì phải chống tâm, không biết khi phay có khả thi không vì không thể chống tâm được, nhưng bù lại lực phay có lẽ nhỏ hơn lực do dao tiện đẩy vào phôi ?
Em cám ơn cả nhà
À quên nói anh cái vụ này , em thấy anh mua cái máy chạy ren ống nước chắc chạy ren tăng đưa chân bàn hơi bị nhanh đó anh Tuấn , suy nghĩ lăn ren hơi xa xỉ.
còn chạy ren ở trong đây khu Tạ Uyên chơi phay ren cho mấy cây dài dài đó anh. mua 1 em dao đĩa chép hình ren , thế là kê vầo cây ti chạy 1 pass từ đầu đến cuối thế là xong, nhớ thiết kế thêm bộ tì vào cây ti khi phay ren nhé anh , chắc 2 cái bạc đạn cũng ok. chạy 1 lần 1 cây dài luôn, xài bao nhiêu cắt bấy nhiêu.
Lần sửa cuối bởi Nam CNC, ngày 29-01-2015 lúc 12:30:46 PM.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648
Mấy cái chân này bước răng hơi thô, có lăn được không bác ? chỗ em có 2 máy tiện chạy liên tục cho mấy cái chân này, em oải với cái vụ tiện quá
răng nhỏ hay thưa thì chơi được hết mà anh Tuấn , anh suy nghĩ lập trình đường chạy dao máy phay với trục A thì ren nhuyễn cỡ nào chẳng được , nhưng mà còn có cái đai ốc nữa , 2 em không ăn khớp có mà chết.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648

Ý cụ hỏi là thread milling?Gửi bởi Tuấn

https://www.youtube.com/watch?v=BdujS2PhBhY
Phay ren ok mà, trong ngoài gì đều được, nhưng phải có dao đúng loại, để tối về chụp cái hình cho ông coi.
Hoặc có thể chế dao bằng cốt kim loại, lấy miếng hợp kim nhét tiện ren nhét ngang qua cốt, đầu cốt làm ren nhỏ để kẹp miếng hợp kim là đuợc.
Thanks các bác, vậy là khả thi òi
Ui cái máy cán ren, hôm nay em mới biết, không biết nó có cán được inox đặc không các bác nhỉ ? thợ nhà em tiện một ngày nhanh lắm cũng chỉ được có 4 cái chân, quả lô cũng không đắt lắm, ui chao mềnh lạc hậu quá đi mất :
hehehe anh lạc hậu lắm òi , nhưng vẫn còn goodle và youtube giúp anh theo kịp thời đại
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648
May là có các sếp khai sáng
Phay ren thường dùng cho loại đường kính lớn và ren nhuyễn thì thích hợp hơn, chứ tiện với lăn nhanh hơn nhiều chứ.
Lần sửa cuối bởi anhcos, ngày 29-01-2015 lúc 06:02:31 PM.
Em không rõ cái này bác ạ, chỗ em làm có cái máy phay bé bé, chỉ dùng để phay rãnh then cavet thôi ạ, còn chân máy thì nó dao động từ phi 25 đến 60. Thợ tiện làm chậm quá, mà công việc thì chân nào cũng giống nhau. Trước em muốn có cái máy tiện cnc để tiện cái ren này, nhưng nghĩ máy tiện khó làm. Đọc chay mach3 mãi cũng ù đầu, làm con máy phay để học cho nó dễ hiểu hơn ạ. Nếu phay ren một cái chân này mà hết khoảng 1-2h là xong thì cũng là tốt cho em lắm rồi ạ. Vụ lăn ren trước giờ em chưa biết, phải ngâm cứu cái mới được
Đúng là là phay ren cho các trường hợp đường kính lớn và khó gá kẹp trên máy tiện ấy.
Cái dao phay ren này chiều dài ren không phay được dài lắm. So sánh với con dao 4ly, chiều cao ren cỡ hơn 1mm:

như trong cái video của bác Huanpt thì em định lấy con dao phay cỡ 25-30 gì đẩy gắn lưỡi hợp kim vào đầu rồi cho nó phay ạ. Trong wizard có kèm trong mach3 em thấy có phần phay ren trong và ren ngoài nên mới có cái ý tưởng này ạ. Cũng có thể do mấy cái máy tiện của em nó cũ quá rồi, chạy nhanh nó rung lắc hỏng dao nên tiện ren quá là chậm
Dao này mình tìm mua lâu lắm rồi mà không có. Bác anhcos mua ở đâu thế?
Con dao này nó mài lại thì phải, nhưng đỉnh dao đến biên bên đối diện đúng bằng 4mm, chắc nó có máy để mài mới chuẩn vậy được.
Mình mua ở tiệm đồ Nhật cũ nằm trên đường Tạ uyên ngay góc ngã tư với Trần Quý, bên cạnh cái ngân hàng. Cao dao này nó nằm trong mấy cái hộp nhỏ đặt sẵn trên bàn ấy. Lục ra tìm, chứ hỏi chưa chắc nó đã nhớ.
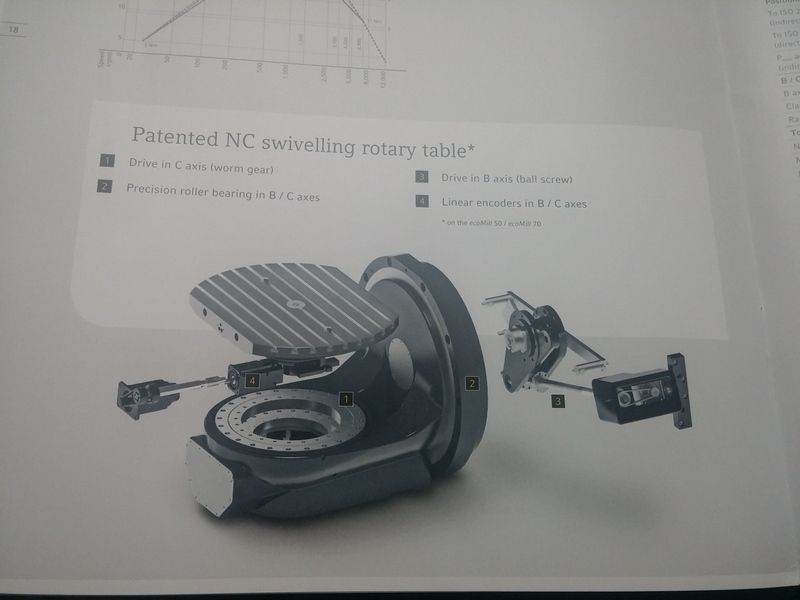
mới dc tặng cuốn catalogue của DMG Mori, MTA ko có đi nên nó gửi qua công ty
mở ra dòng ecoline thì thấy 1 phương thức lắc trục chính xác cao mà đơn giản
nói đơn giản vậy thôi chứ cũng phức cmn tạp lém chứ ko phải cắm là chạy, cơ bản đảm bảo chính xác cao, lực mạnh, chế tạo đơn giản nhưng dk chưa chắc êm
lh: Nam 0989 050 650

Cái này nó phải tự nội suy vì cơ cấu này góc quay không tuyến tính theo motor.
Hoặc phải có encoder lắp trực tiếp trên trục xoay.
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
 Quyền viết bài
Quyền viết bài