Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnCho em spam tý nhé.
Bác để lại con servo để nghiên cứu, bán lại cho em cái combo để em làm trục Z
Bác cho em hỏi cái trục Z hành trình thực dụng bao nhiêu vậy bác ?

 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.



Chào các cao thủ,
Em thấy bác Nhật Sơn đã giảng nhiều về Stepper nhưng chưa thấy ai giảng về servo hết nên xin các cao thủ chỉ giáo với.
Em mới mua 1 em tính dùng để làm trục Z như trong hình
Em này có 1 bộ thắng: chích điện 24v vào thì nhả thắng ra, quay trục được.
Encoder: từ encoder ra 4 sợi dây vào 1 board mini rồi ra một đống dây (chắc cũng phải hơn 6 sợi, em chưa đếm kỹ)
Dây motor của em gồm 3 dây: dây đỏ, đen & trắng thông nhau. Sau lưng ghi 60v. Em chích que đo của em thôi mà đã thấy motor có phản ứng, cắm 24v vào từng cặp một thì motor nhúc nhích 1 phách rồi đứng, chuyển cặp khác thì nhúc nhích tiếp, phải cái nó ra cái mùi giống giống mùi điện nẹt.
1. Như vậy chú này là motor loại gì vậy các cao thủ? AC servo hay DC servo hay brushless DC?
2. Tại sao em chích que đo ko thôi đã thấy nhúc nhích? Mà cho 24v vào thì có mùi mặc dù dây ko nóng (dây kep cá sấu mini).
3. Nếu là Brushless DC, quay bằng 3 dây UVW thì em có dùng nó để điều khiển theo kiểu stepper motor được ko? Hay nên điều khiển theo dạng servo hay hybrid?
4. Trong trường hợp mình cần điều khiển theo dạng servo, Mach3 đầu ra là pulse chứ ko phải tọa độ điểm đến, mình điều khiển bằng cách nào?
5. Khi chạy cnc theo kiểu servo, bị overshoot thì miếng phay của mình cũng bị ảnh hưởng theo, trong trường hợp như thế thì các cao thủ chuyên dùng servo thấy các hãng giải quyết bằng cách nào?
Cảm ơn các bác nhe!
Cho em spam tý nhé.
Bác để lại con servo để nghiên cứu, bán lại cho em cái combo để em làm trục Z
Bác cho em hỏi cái trục Z hành trình thực dụng bao nhiêu vậy bác ?
KHÔNG NGỪNG ĐAM MÊ - KHÔNG NGỪNG SÁNG TẠO
Bolg : phipdong.blogspot.com
email : ngocanh.songlong@gmail.com
ĐT : 090.447.5528
trước em có con này, là ac servo motor/ brushless servo , néu là ac thì phải dùng sin PWM, còn nếu là bushless DC thì dùng six 6 okies
em nghiêng về khả năng con này là Brushless DC hơn
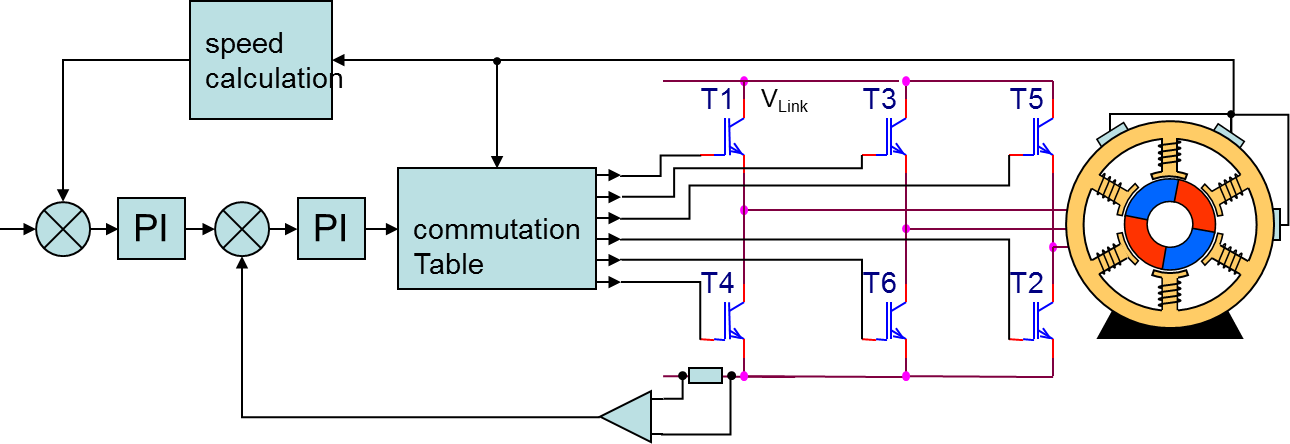
ac servo/ brushless servo cần 2 khâu điều khiển , 1 khâu điều khiển quay ( speed control) 1 khau dkhien position control
khâu speed
khau điều khiển vị trí
về việc overshoot, ngoài vòng closed loop dùng PID các hãng bổ sung thêm các vòng fillter như FIR, IIR
nếu ko yêu cầu cao, thì em thấy overshoot trong phạm vi cho phép là được, ví dụ encoder 10.000p/r, overshot có 50 hay 100p/r cũng ko vấn đề
lý do, với ball crew 5mm, 100/10.0000 =2/1000mm , để đạt độ chính xác này là ko đơn giản với giàn cơ khí rồi ah
brushless dkhien vị trí khó khơn với brush, vì brushless sẽ cần 1 khâu điều khiển QUAY, đơn giản nhất là six step, sau đó là sin pwm, bi giờ là FOC, direct torque...vv và vv
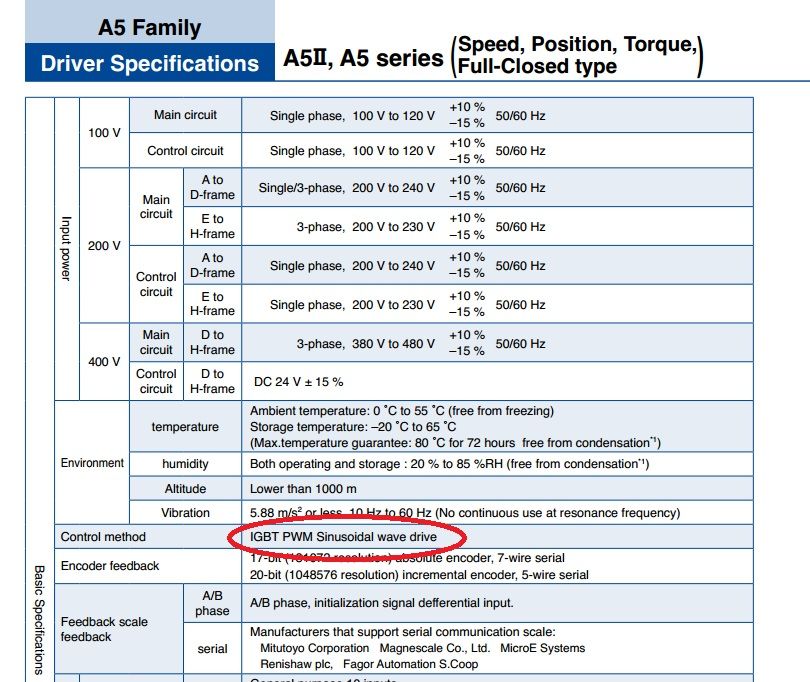
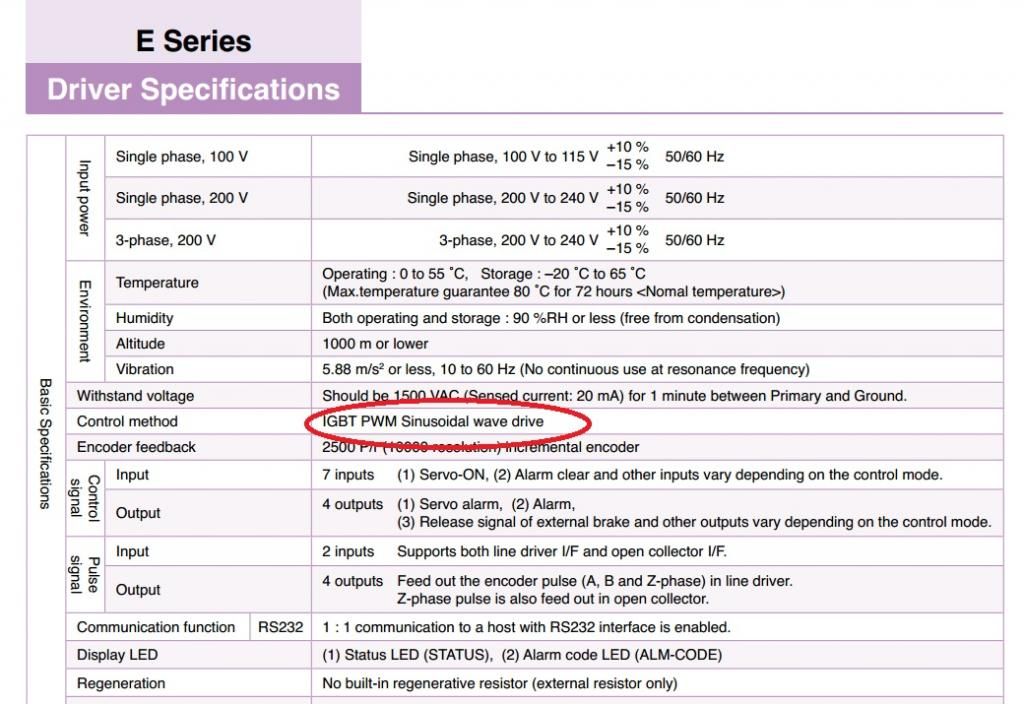
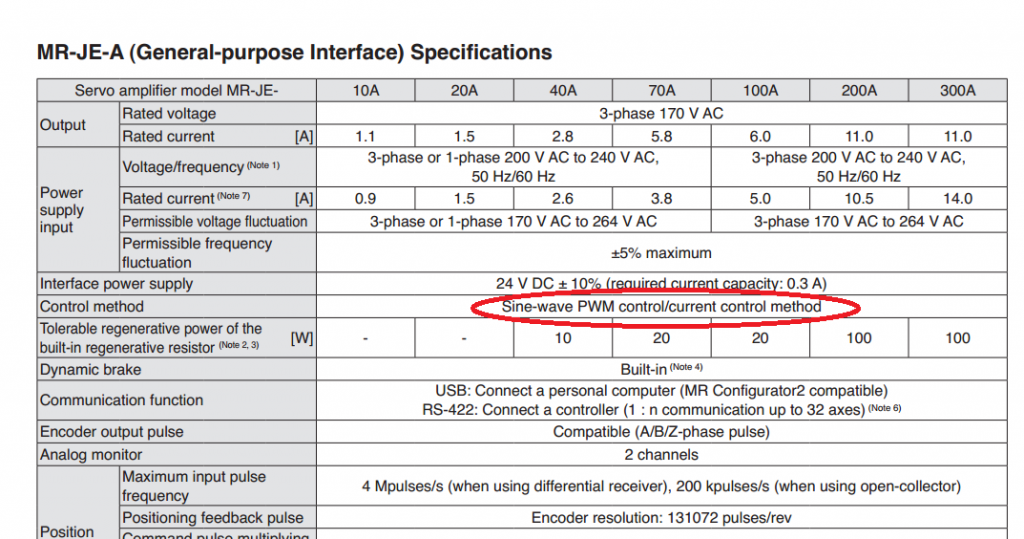
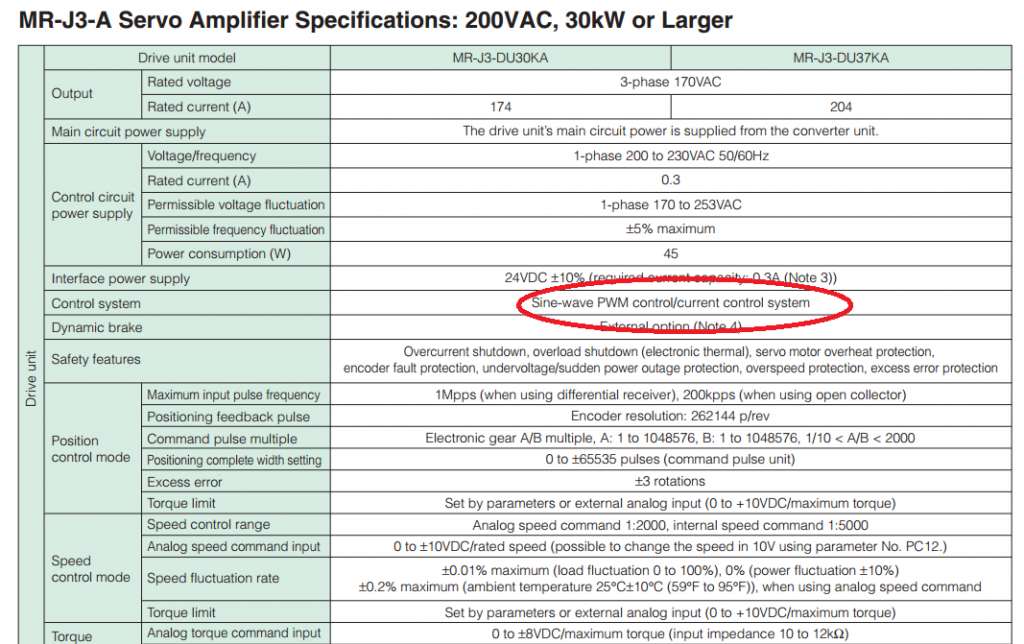
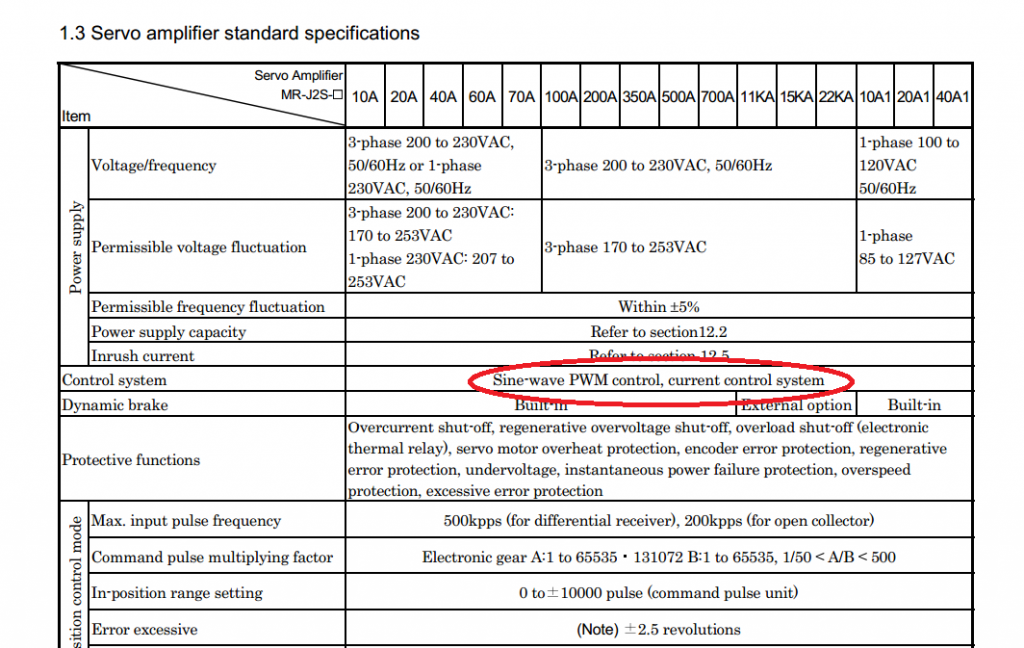
em vẫn thấy các hãng hiện nay dùng SIN PWM cho ac servo của minh
ví dụ
panasonic a5
panasonic a4
b.r
Lần sửa cuối bởi nhatson, ngày 30-08-2014 lúc 11:04:05 AM.
trước em có món này, nó dính liền ở trong cụm, cốt motor liền với ballscrew ahGửi bởi ngocanhld2802

Thế thì khó sử lý hả bác, em đang cần cái bộ combo đại loại như thế, hành trình khoảng 130 để lắp vào máy làm trục Z bác ah
KHÔNG NGỪNG ĐAM MÊ - KHÔNG NGỪNG SÁNG TẠO
Bolg : phipdong.blogspot.com
email : ngocanh.songlong@gmail.com
ĐT : 090.447.5528
Hehe, em cũng nghi là con này ko có khớp nối đâu bác, tại phần host motor ngắn lắm, nếu có khớp nối nữa thì ko thể ngắn thế này.
Cái này ngoài bãi còn đầy, hành trình khoảng >100, nếu bác thích em iu khoa học thì em mua giùm bác, nhưng nếu như bác Nhật Sơn nói đúng thì chết cha chủ bãi rồi)
Nói chung là hàng ngon, cứng chắc, servo kèm thắng là em kết rồi, phải tội ko có thiết bị điều khiển
Nhờ các cao thủ chỉ giáo tiếp giùm nhe. Bữa nào em iu khoa học xong sẽ khè các bác.
Lần sửa cuối bởi Gamo, ngày 30-08-2014 lúc 11:01:06 AM.
bộ đấy ngon ah, thắng của nó cũng dễ tháo, nó có cái khớp hình vuông gắn vào, tháo ốc ra rút thắng là xài vô tư ah
b.r
Ui, thank kiu bác Nhật Sơn :x để em thử vụ 6 steps xem sao :x
brushless servo, cách đây 5 năm thì là vấn đề lớn, giờ thì nhỏ rồi
phần công suất rẻ hơn, vì có thể sử dụng ké phần cs của mấy thiết bị inverter như máy lạnh, máy giặt chẳng hạn, trước kia 100usd , giờ chỉ còn 30usb
về dkhien , trước khi là MCU mạnh, floating point + FPGA
giờ thì có ARM M3 cortex , thậm chí là dou core, rồi FPGA có thể nhúng core ARM , giá thành cũng hạ hơn, trước kia có tms320f28xx giá trên 10usd 1 con, ( ac servo china em thấy 2 dùng). giờ thì stm32, lpc178xx cở 5USD là ổn
phần còn lại là motor và encoder
b.r
Lần sửa cuối bởi nhatson, ngày 30-08-2014 lúc 11:13:06 AM.
Bác gà mờ xem hộ em hành trình bao nhiêu, giá cả thế nào cho em chút thông tin nhé
KHÔNG NGỪNG ĐAM MÊ - KHÔNG NGỪNG SÁNG TẠO
Bolg : phipdong.blogspot.com
email : ngocanh.songlong@gmail.com
ĐT : 090.447.5528
cụ gà có đi bãi , nếu gặp đồ USA, có thể sẽ gặp drive của advance motion control (A-C-M)
brushless servo của họ dùng 6 step, ngõ vào analog
dùng MCU pid cho position> voltage> speed amplifier
mô hình này em thấy thiết bị cỡ trung của USA hay dùng
b.r
Hehe, em nó dài 350, rộng (bản trượt) 100, hành trình 105, trọng lượng 3kg, ngoài bãi bán giá 400k/kg
Lần sửa cuối bởi Gamo, ngày 30-08-2014 lúc 11:28:35 AM.
Holy.... huhu, hôm trước em thấy mà ko biết dùng, nhắn tin báo cha Nam, ko biết chả có mua chưa, giờ sợ bọn nó hốt mất tiêu rồi...
Lần sửa cuối bởi Gamo, ngày 30-08-2014 lúc 11:29:02 AM.
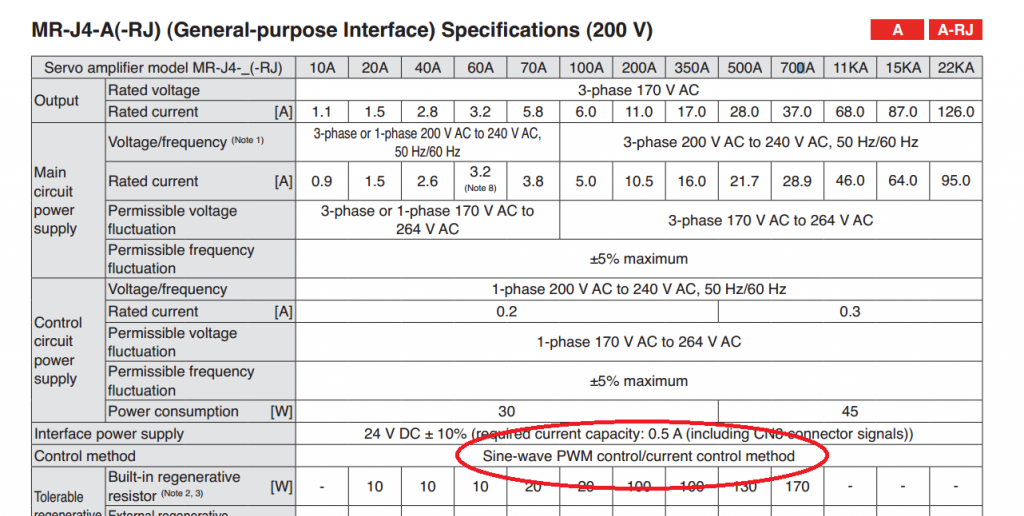
típ tục, servo mitsu, cao cấp của japan mà em thấy vần dùng sin pwm, ko biết có lừa tình ko
nếu là ở dương bá trạc thì em thấy nó có 1 khay, chác hơn 10 cái nằm chỏng chơ
b.r
Ẹc... bọn nào hả bác? (khúc nào á? sợ nhiều khi em ko để ý)
Mrs&Mr Loan Long, vào nhà kho, quẹo phải gần đống trượt vít me khủng long, có 1tủ điện, trên đó còn 1 đống drive chưa gỡ ra
b.r
ngỏ vào PWM có luôn, cụ kết hợp với ELM servo là có thể position control, mô hình này na ná với máy CNC XỊN, drive ngõ vào analog, position control do CNC controller thực hiện
nhờ cái drive này mà em hiểu được ac servo drive, DC thì 1 khâu là đủ, vì PWM là motor chay rồi, còn với brushless/ ac nó cần khâu quay trước, rồi mới position control được
http://elm-chan.org/works/smc/report_e.html

Lần sửa cuối bởi nhatson, ngày 30-08-2014 lúc 11:41:02 AM.

hố hố ta lót dép xem . sau khi nâng cấp từ 2 lên 5 đã thất bại thảm hại . giờ ngắm mấy em AC servo . thử nốt ko ngon ta về 2 pha với tb6560
0978835302
hehe , cụ cứ nhăt nhanh lung tung, phải match pair mới ngon được
 Quyền viết bài
Quyền viết bài