Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnChắc mình cũng theo 10 bộ, nghiêm túc.Gửi bởi Khánh Nam

Thanks

 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.



Dân buôn không chơi

Chắc mình cũng theo 10 bộ, nghiêm túc.
Thanks

bác lại thích giọng thách thức . chồng tiền mình mang cho 10 bộ thanks.
http://www.lsmecapion.com/eng/conten...ate1=_01020000
Driver
Motor
http://www.tudonghoa24.com/Dong-co-S...ADK-t5240.html
Cần 10 hay 20 cứ pm . xin thời gian 10 ngày gom đủ cho bạn còn kiểu thách đố ít nói ko ngại bạn
0978835302
Được quá đi ấy chứ he he xin pm nhu cầu vo inbox
0978835302
Máy cnc bản đúc đã về chưa bạn Hoài
À chưa xong đâu bác đang có chút trục trặc . 4060 thì đi ngay ngày hôm sau
0978835302
Hôm nào chạy qua đây cho xem it ray và mấy em Servo J4 mới sưa tầm về đc hôm nay haha
trong này chắc phải 5t- 6t rồi ah
b.r
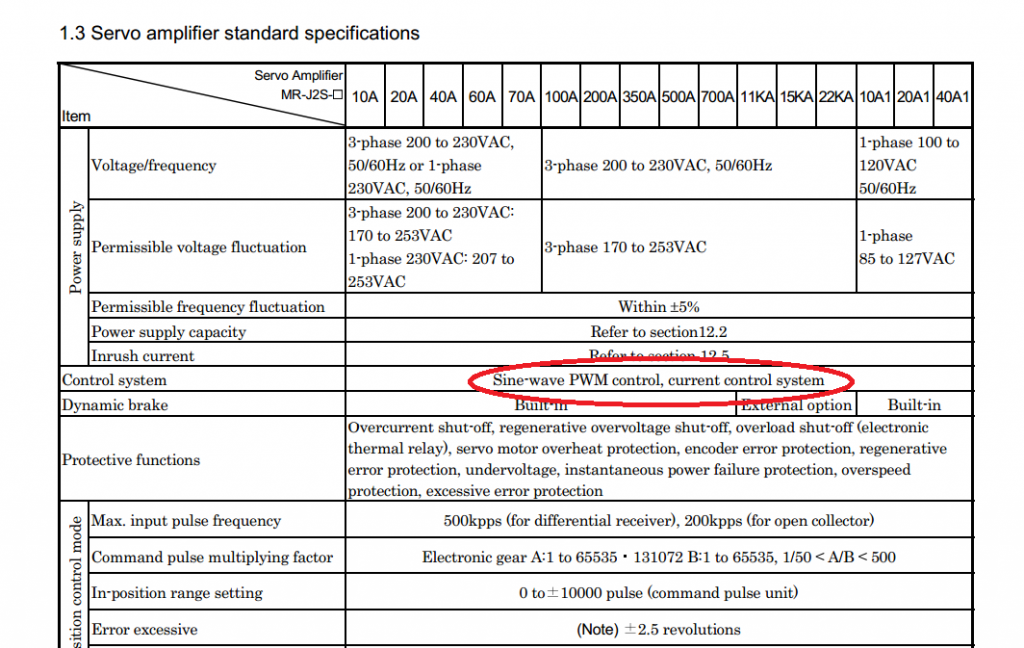
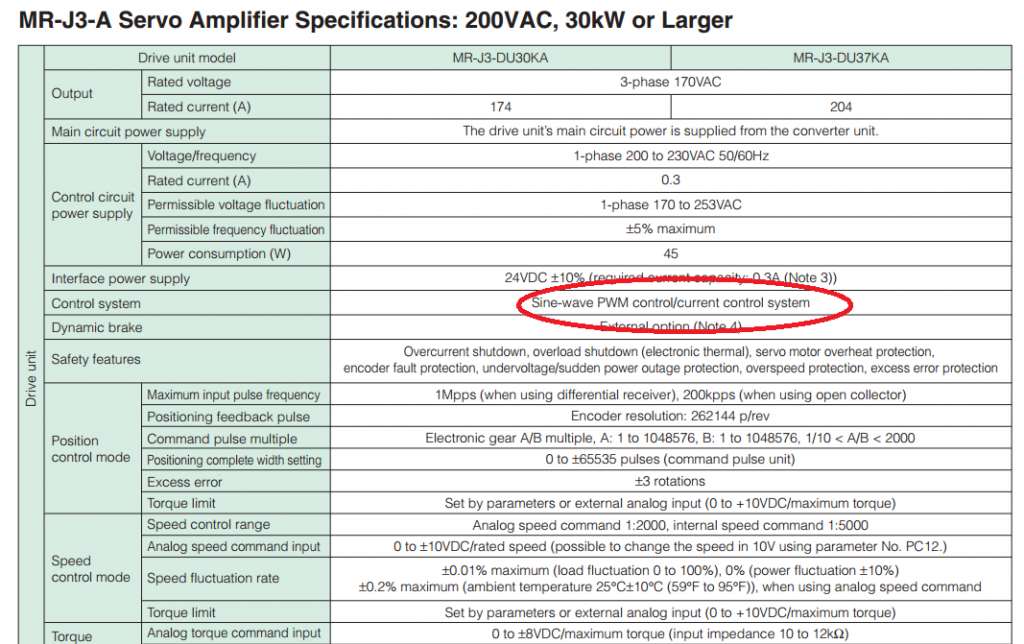
chỗ màu đỏ, các loại servo mới, lúc position comand =0 , có lẽ sẽ chạy như step ( ko dùng position control mà chỉ tang dòng để giữ vị trí )
nếu em làm ac servo em cug sẽ áp dụng p án này
còn 1 việc quan trọng nữa, step . ac servo. dc servo, DD servo, linear servo.... tiếng việt em nghĩ đống này gọi là động cơ trợ động
CNC chỉ dùng 30% động cơ trợ động, còn thế giới 70% to lớn mọi người bỏ quên, nên xét trên tổng thể 100% của động cơ trợ động ah
b.r
Ngon pác đợi kit mình xong rồi đo đạc đi kiếm đồ đắp vô
0978835302
wan điểm của em về step vs servo
step càng ngày càng phát triển
servo ko phát triển nhiều, giờ rẻ ra hai hướng linear và Direct drive, do step càng ngày càng tốt >> servo phải xuống nước làm mấy dòng giá rẻ để hạn chế cuộc chơi cùa step
mitsu có MELSERVO-JN
http://www.mitsubishielectric.com/fa..._jn/index.html
yaskawa có SJDE Junma
https://www.yaskawa.com/pycprd/produ...cks/sjde-junma
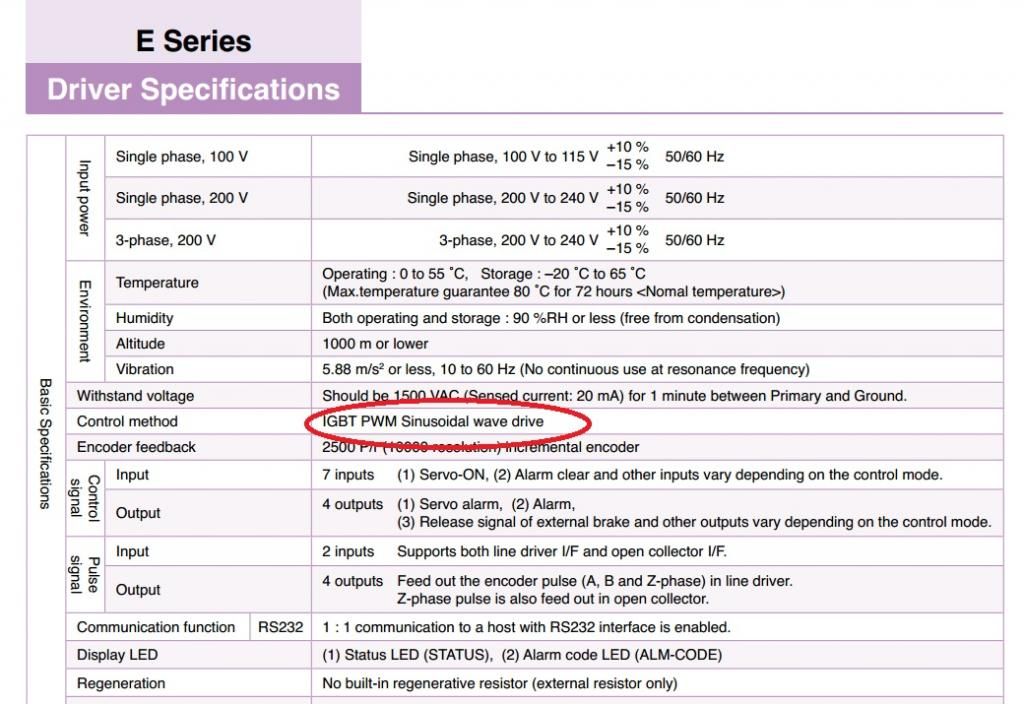
panasonic MINAS E-Series
http://industrial.panasonic.com/ww/i...-lineup_e.html
một số hãng làm ac servo giá gần chạm step
http://www.teknic.com/products/clear...-servo-motors/
http://www.dmm-tech.com/Dyn2_v2.html
Đề nghị đồng chí Quảng bê cái sọt này sang mục Bán nhé.
Khi nào hàng về thì hú một tiếng nhé. hehehe
Em chỉ nói là khó thôi. con Shifness thì servo đời mới chắc đạt được.
topic này lên nhanh quá, chẳng biết gì nên e xin .. lót dép ngồi nghe.



Thực sự servo sẽ ko dùng đc phương pháp như step để giữ vị trí do đặc thù cấu tạo. Việc tăng dòng để giữ vị trí còn làm phát sinh nhiệt. Các servo hiện nay sử dụng thuật toán đk vector cùng encoder tốc độ cao nên giảm đc rung động gần như hoàn hảo. Việc còn lại phụ thuộc vào pp turning. Theo kinh nghiệm, việc để autoturning theo manual là chưa đủ để có cơ hệ hoàn hảo.
em cũng đang thắc mắc là dùng FOC hay sin pwm , em chưa có time kiểm tra
vấn đề tăng dòng là hiển nhiên khi có lực tác động làm sai vị trí, PID POSITON> PI VELOCITY> PI TORQUE >>torque dĩ nhiên là cần phải tăng để hold position , tương tự khi ko có lực tác dộng>> ko cần tăng dòng để tạo torque
nếu chỉ tăng torque vector lực giữ nguyên hướng chỉ tăng module, shaft có xu hướng giữ nguyên vị trí, còn nều PID vị trí thì vector lực ( FOC) sẽ thay đổi huong liên tục > hunting
cái này suy nghĩ của em thôi, hôm nào lụm servo về , gắn tải giả>> kẹp lên current probe mới kiểm định được là nó chỉ tăng dòng hay PID cả vị trí
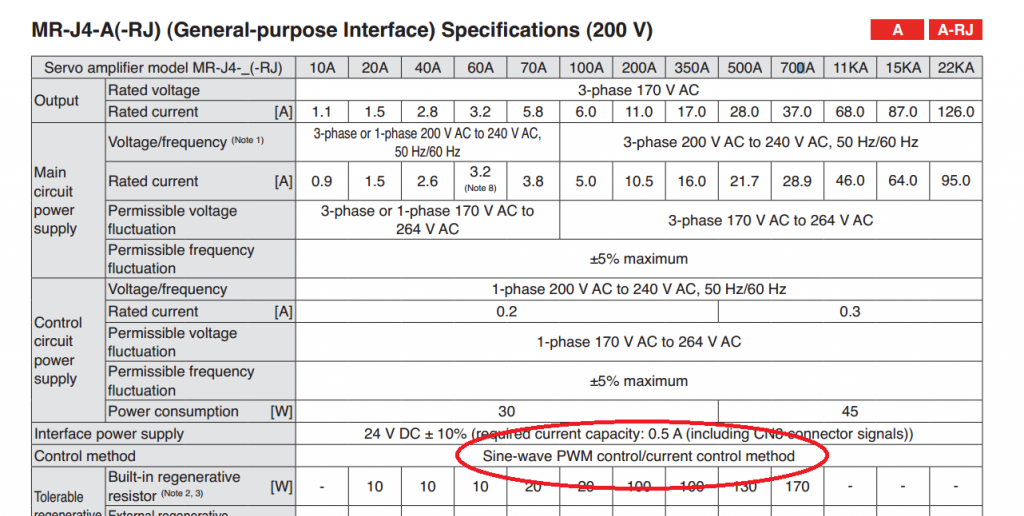
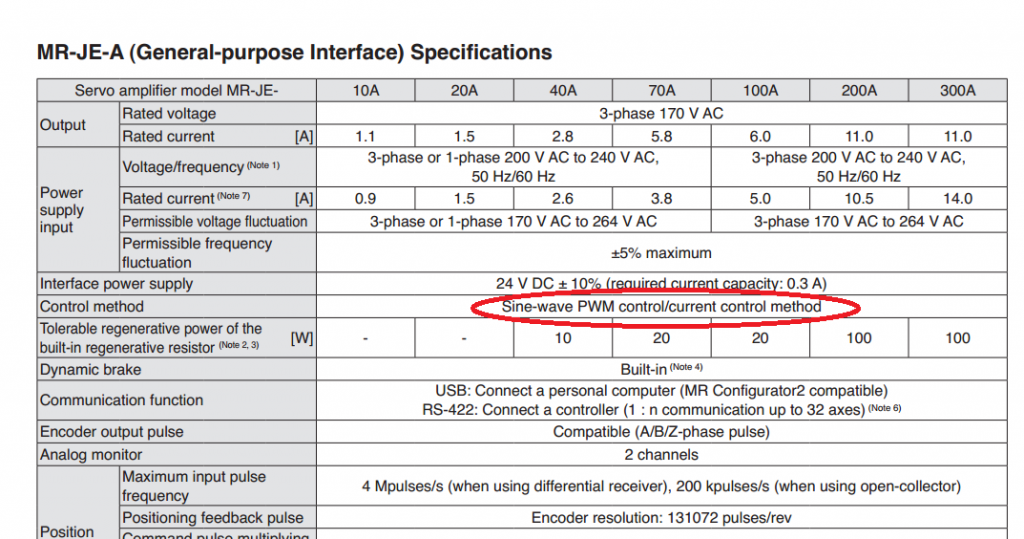
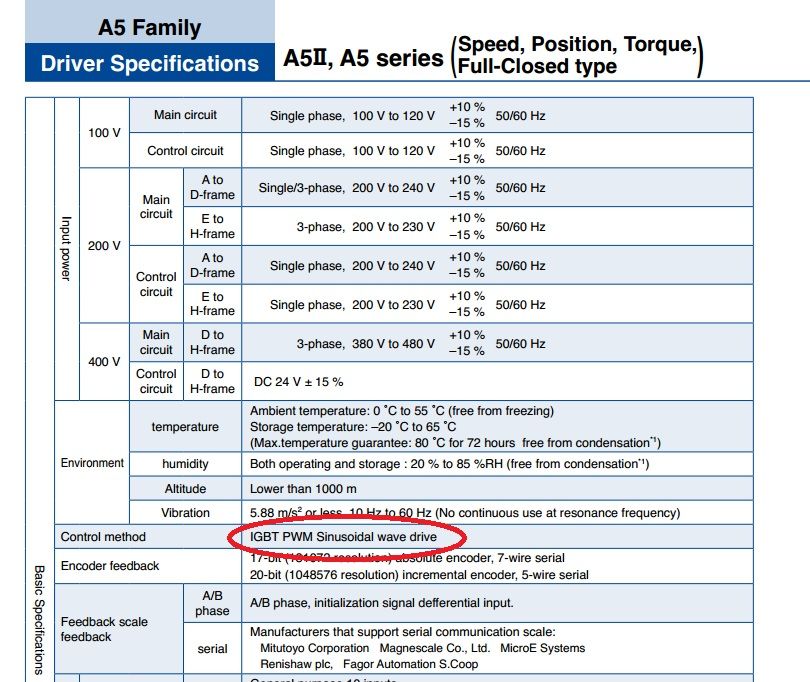
đại trưng vài thằng, toàn ghi là sin pwm
có con yaskawa servo, mà cũng chưa có động lực kiểm tra nó chạy bàng pp sin pwm hay FOC
Lần sửa cuối bởi nhatson, ngày 03-10-2014 lúc 08:15:55 AM.
bằng sáng chế về đồng bộ servo đến từ fanuc
https://docs.google.com/viewer?url=p.../US5025200.pdf
b.r
Lần sửa cuối bởi nhatson, ngày 03-10-2014 lúc 11:56:47 AM.
còn dây, brushless dc servo, mô hình này em thấy ko khác với step 2 phase là mấy
ps truóc đây em có nói em có thể xem step 2 phase là 1 con bruhless 2 phase 50pole đấu với con servo 3 phase PMSM = 3 phase brushless có 8pole
https://docs.google.com/viewer?url=p.../US3461367.pdf

mô hình dkhien brushless servo 3 phase bằng analog
https://docs.google.com/viewer?url=p.../US4447771.pdf

 Quyền viết bài
Quyền viết bài