


 Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnMình gặp loại AC Servo Brushless 3 phase 6 poles. Đang bị đuối ở Autoturning Nhatson ơi. Turning hoài mà ko đc, motor bị rung khi stop. Trong khi loại 8poles thì ok. Có lẽ hàm truyền bị tính sai. Bạn có thể giúp mình ko?Gửi bởi nhatson


 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.





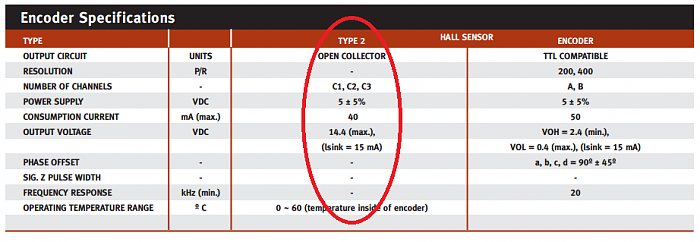
Vì gà quá, không biết cách tải PDF nên đành gởi tạm hình vậy
Loại này chỉ có hall thôi, ko có encoder.
Lần sửa cuối bởi Tuanlm, ngày 05-10-2014 lúc 03:49:42 PM.
Mình gặp loại AC Servo Brushless 3 phase 6 poles. Đang bị đuối ở Autoturning Nhatson ơi. Turning hoài mà ko đc, motor bị rung khi stop. Trong khi loại 8poles thì ok. Có lẽ hàm truyền bị tính sai. Bạn có thể giúp mình ko?
sao ko chuyển về manual turning ah?
manual mà ko được thì tăng cs motor thôi ah
b.r
MÌnh dùng Driver DIY viết trên PIC 32 vs IGBT modul. Đang tính làm mấy cái driver đa năng í mà. MÌnh cũng có con mấy con omron rồi. Nhưng bị vướng lại 1 con 6 poles. Manual thì mình tự nhập các thông số kP, kI, kD thì chạy tương đối ok. Đang tham vọng Autoturning cho nó Bờ rồ tí.. Ngắm nghía kỹ thuật Dynamic PID control nhưng đầu óc đen tối quá, ko du nhập thêm được.
Lần sửa cuối bởi Tuanlm, ngày 05-10-2014 lúc 04:16:37 PM.
auto theo em biết thì mô hình hoá động cơ, motor thì mỗi hãng mỗi kiểu , mỗi dòng motor một kiểu luôn> em thấy auto chỉ khả thi khi fix motor theo drive, còn motor đủ kiểu thì căng
em có câu hỏi là chay servo, pp dkhien động cơ quay theo pan nào ah?
sin pwm hay foc?
b.r
Lần sửa cuối bởi nhatson, ngày 05-10-2014 lúc 04:16:56 PM.
MÌnh dùng SVM thôi. Dân amatuer Miền trung nên chỉ được có vậy
em thấy các hãng vẫn ghi là SIN PWM mà
có mấy hãng us, eu cty tư nhân em thấy quảng cáo dùng FOC , nhưng chưa thử thực tế nên chưa biết mèo nào cắn mỉu nào
nhưng em dùng current control để dkhien ac servo motor ấy, coi nó là direct torque control cũng được nhi?
về bộ dkhien, đa năng thì em thấy cứ manual, còn nếu fix được motor của mình thì hãy auto turning ah
b.r
Lần sửa cuối bởi nhatson, ngày 05-10-2014 lúc 04:24:29 PM.
Câu hỏi đã sai rồi thì hỏi làm gì!!!
sin pwm là kỹ thuật điều chế.
FOC là thuật toán điều khiển động cơ.
em dùng sin pwm > sin voltage >> chít vào 3 phase motor có quay ko nhi?
cái này em có thể gọi là sin pwm ko?
b.r
Lần sửa cuối bởi nhatson, ngày 05-10-2014 lúc 04:47:12 PM.
Thực sự cơ sở lý luận của FOC chặt chẽ hơn SinPWM, SVM của mình chỉ là mức độ sơ khai của FOC (mình dùng một phương trình chuẩn cho tất cả các đối tượng). Nhưng FOC của mỗi hãng mỗi khác (ý kiến cá nhân). Còn ở mức độ DIY thì mình thấy không cần yêu cầu quá cao. Mình dùng pp đk Brushless theo hai hướng. 1. Sensorless, 2. Included Hall Sensor
pp1. Đk ở mode Speed hiệu quả hơn, motor HC-KFS23 có thể lên tới 6000 rpm, nhưng Torque thấp.
PP2. Đk Position hiệu quả vì torque cao. Nhưng khi chạy trên 4000 rpm thì motor bị rung và nóng, mất torque.
MÌnh lắp vô máy tiện mini hai động cơ 400w, dùng cs là IGBT lấy ra từ biến tần cũ thì thấy độ chính xác và độ ổn định cũng rất cao cỡ 5~8um đối với đồng thau, còn với thép thì thấp hơn. Như vậy là quá đủ đối với nhu cầu.
Thực sự thì ko có phân biệt rõ như bạn nói đâu. Kỹ thuật điều chế là PWM. Còn khi nó được điều chế dạng SIN thì là Sin PWM. Biến Sin đi một tí là SVM hay FOC
em cứ hiểu nôm na
sin pwm , em dựa vào góc rotor> giá trị sin > pwm > pp ưa chuộng của em khi dkhien motor với analog và mạch logic
foc.....cũng góc rotor nhưng sẽ có 1 loạt tính toán> pwm
Lần sửa cuối bởi nhatson, ngày 05-10-2014 lúc 04:54:05 PM.
Ngoài Sin PWM ra còn có SIN PFM nữa.
dụ này mới vói em, ngồi hóng cụ
HC-KFS23 con này em nhớ là encoder tuyệt đối 17bit, cụ có giao thức của encoder ah?
Các bác tốt nghiệp đại học ngành gì?
em wa lớp 12 tí thôi, nên bác ko cần bận tâm giảng giải lý thuyết cao siêu
em cần minh hoạ bằng hình ảnh, âm thah, video clip mới thông não em được
mọi người nói step khác servo, em chứng minh 2 cái tương dòng bằng cách dùng step drive chạy servo
ko tương đồng thì ko thể hoạt động tương tự được chứ nhẩy?
em nghĩ, đại học hay tiến sĩ có giá trị gì ở đây, vấn đề là dám bỏ công ra chứng minh điều mình nghĩ, còn nếu bác chỉ ngồi chém ko thì..... lại làm em cảm thấy mình xấu
b.r
Lần sửa cuối bởi nhatson, ngày 05-10-2014 lúc 05:39:52 PM.
Đúng rồi, nó dùng chuẩn riêng của mitsubishi gọi là "mitsubishi high-speed serial", chú Delta của Taiwan có mua bản quyền sx. Mình chưa chia sẻ được vì người cho mình chưa đồng ý
Bạn Nhatson học trên mình một vài lớp.
Hì hì. Chỉ là một mớ lý thuyết hỗn độn. Về thực tế, mình thua xa lắc mấy bạn trong sg.
PFM đơn thuần là "Pulse Frequency Modulation", tương tự như điều chế FM trong Radio.
 Quyền viết bài
Quyền viết bài