để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.



Haiz, dân kinh doanh nghe chú nhóc này nói thì biết là nó ko có làm driver chuyên nghiệp rồi. Mặc kệ em nó hoang tưởng, các bác chém nhau tiếp đeeee, em ngồi nghe tiếp)
Lần sửa cuối bởi Gamo, ngày 07-10-2014 lúc 07:06:22 AM.



Anh em mình coi như ko có mặt giáo sư thọt lét này đi.

--- Mấy bác làm loãng chủ đề quá, bác marl gì đấy có hàng bán thì show anh em xem thử, cho vài video demo để anh em còn ủng hộ.
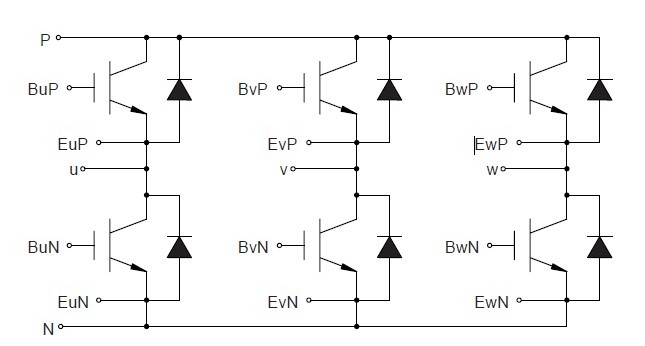
--- Ở nhà em cũng còn vài con Ac Servo, chắc em cũng tính chế thử cho nó chạy thế nào. Em cũng mới xem qua thì nó cũng điều khiển qua các pole và các cog, mà rõ ràng là các pole và cog đều có giới hạn nên em nghĩ khi điều khiển thì phải control current qua các cuộn dây, mà với 3 cái nửa cầu H này em ko biết điển khiển dòng như thế nào, cái này cũng giống mạch driver step 5 phases mà có đk vi bước, có bác nào biết nguyên lý đk dòng này ko góp ý giúp em với?
--- Em đang có cục này để thử kích bình thường xem chạy đc ko biết.
Email: duonghoang05@gmail.com
Mobile: 0988467839
xét trường hợp motor là đồng bộ ( lõi là nam châm)
em lại post lại cái này, trường phái analog, dùng opam và mạch logic
trường phái này thịnh hành những năm 70, 80, qua nhửng năm 90
Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 10:01:07 AM.
hiện tại hay dùng MCU mạnh để dkhien
TI C2000 > có aplication note dkhien vị trí với motor PMSM
STM32
Freescale 56f8xxx
Renesas RX62T > có aplication note dkhien vị trí với motor PMSM
cụ check topic trước em có giới thiệu hết rồi nhé
--- Thank bác Nhatson, mà cái con công suất phía trên em cũng lấy ra từ bộ Driver Servo của thằng Fuji, vậy cái loại đó nó đk kiểu gì bác.
--- Em có thấy nó mô tả loại Brushless trong ổ CD
--- Ở đây cái stator là nam châm vĩnh cửu, vậy là người ta có thể chế tạo ra số 12 poles như trên hình hả bác? Mà nhìn hình em nghĩ số Poles phải bằng số Cogs mới hợp lý chứ?
http://elabz.com/brushless-dc-motor-with-arduino/
Email: duonghoang05@gmail.com
Mobile: 0988467839
báo cáo, em nhớ là stator là phần đứng yên, rotor là phần quay ah
pole> nam châm > có N và S thôi ah
cogs > mih đang dùng 3 phase
dạo này em thấy còn có thêm motor stoless này nữa

Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 10:47:54 AM.
Hình như Mitsu đang chơi kiểu này.
tài liệu thì em nghĩ có 2 cuốn tiếng việt
1 diều khiển tự động truyền động điện xoay chiều 3 phase- tiến sĩ nguyễn phùng quang, cái này có bản tiếng anh, em nghĩ có xem nên xem 2 cái cùng lúc, cuốn tiếng việt việt hoá > viết tắt nhiều, em rối phin
bản tiếng anh thì xem google doc
http://books.google.com.vn/books?id=...chines&f=false
2. truyền động điên thông minh- nguyễn phùng quang/ andreas ditttrich
tài liệu rất nhức đầu
mình tập trung vào động cơ đồng bộ, cái này dễ đọc hơn
http://books.google.com.vn/books?id=...chines&f=false
sách thì em chịu, ko đọc hết được, em thik đọc apllication note của mấy hãng sản xuất linh kiện điện tử hơn
sau này MCU/DSC/DSP mạnh và rẻ, bà con chuyên qua dùng mô hình rồi chạy luôn, ko thèm tối ưu code
http://www.mathworks.com/help/rtw/ex...s-machine.html
dùng MCU của texa intrusment có thêm vissim
http://www.vissim.com/piccolo_support
Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 11:33:14 AM.
Quan trọng vẫn là công nghệ động cơ. Ý tưởng làm driver của mình cũng dựa trên một số loại động cơ mà mình được chuyển cho giao thức encoder và Flash map. Qua thời gian nghịch phá mình thấy dẫn đầu vẫn là Mitsu và yaskawa ( Fanuc
Nếu tự chế driver mà bỏ đi encoder nguyên bản thì cũng ko kinh tế lắm do phải đầu tư encoder. Vì vậy anh em nào muốn làm thì chỉ nên dựa trên những dòng Motor thông dụng, dễ kiếm trên thị trường.

Lúc trước em chơi bên RC, vụ brushless motor thì có tìm hiểu đôi chút. Trong RC có phân biệt 02 loại rất rỏ là sensorless & sensor.
- brushless motor là một dạng motor đồng bộ, thường thấy là stator cuộn dây & rotor là nam châm vĩnh cữu. Nó lại chia ra thành ỉnunner & outrunner để chỉ cái rotor nó nằm bên trong hay bên ngoài. Ưu/nhược của 2 cái này phân tích sau.
- sensorless nó nhận biết vị trí các cực từ thông qua dòng hồi tiếp từ chính các cuộn dây trên startor. Ưu điểm là đơn giản, rẻ tiền. Nhược điểm là motor khó khởi động, moment khởi động thấp, thời gian tăng tốc chậm (gia tốc thấp).
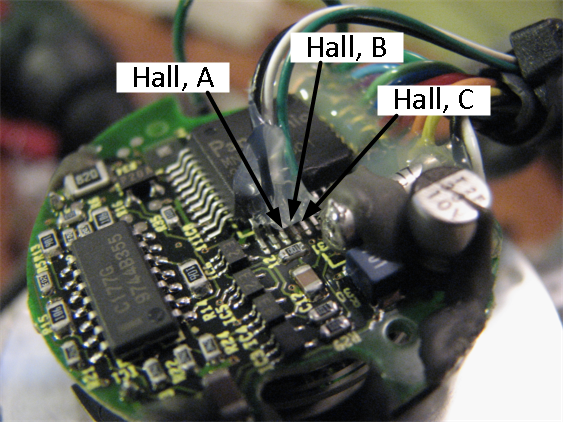
- sensor: thằng này lại được chia ra làm 02 nhóm.. 1 nhóm nó dùng encoder quang như là AC servo của mình, 1 nhóm thì nó dùng mấy con hall dấu trong cái stator để dò vị trí rotor. Nhóm này cho tốc độ đáp ứng và moment khởi động cực cao. Bù lại thì giá đắt hơn rất nhiều so với loại brushless.
Với công nghệ nam châm ngày càng dữ.. motor dùng trong RC cho hiệu năng công suất trên khối lượng cực cao. Công suất 500W mà kích thước rất bé (khoảng phi 30, dài 60-70mm thôi). Đương nhiên thời gian làm việc liên tục không cao, chuyên cho RC mà.
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
Điều khiển motor RC brushless thì thấy rất đơn giản.. chuyển qua position control thì em chẵng biết hehe. Mô hình điểu khiển của các loại đắt tiền thì thấy sam sam với mấy cái servo vậy... (chạy speed chắc y chang luôn).
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
trở lại chuyện encoder, trước em rất géc ABS, như anh TUANLM nói, hãng ko công bố potocol, muốn có phải mua bản quyền, làm thương mai, sáp tới vào TTP , việc bản quyền sẽ còn siết chặt hơn nữa
encoder em thấy giờ có 2 giải pháp
1. mangetic abs, của avago giờ là 16bit ABS
2. encoder của CUI, cở 20USD 1 con
fanuc, em thấy centriod retrofit cũng tháo bỏ cái pluse code của fanuc thay encoder của hãng vào, pluse code của fanuc em nhớ là có protocol trong 1 cái patent nào đó của hãng mà em wên mất rồi
việc quan trọng nữa là servo cho CNC là khó , nhưng servo đâu phhải chì dùng cho CNC, còn nhiều ứng dụng khác, chúng ta co thế dựa vào chỗ này
b.r
Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 01:34:45 PM.
về control, các hãng giờ hỗ trợ nhiều, như em giời thiêu TI có instal spin motion, gần như mua về là có thể chạy servo position rồiGửi bởi CKD

thách thức là phần công suất và sensor dòng thật ít noise > moment dkhien mới tốt được
nhưng ko sao, việc dì cũng cần thử nghiệm cải tiến.
Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 01:41:12 PM.
brushless cơ bản là phải dò vị trí của rotor, trước kia servo luôn có tín hiệu cho UVW và encoder, trừ ABS thì có thế biết vị trí ko cần tín hiệu UVW
dùng encoder ko cũng okies, có pp để xác định vị trí rotor ko cần hall , nhưng mà như vậy khi xác định rotor sẽ nhúc nhik, em rất ấm ức là mấy con servo đời 95, 2k nó chì có abz của encoder nhưng ko cần intal để xác định vị trí rotor, em đọc manual hình như bọn này truyền nối tiếp vị trí rotor , chỉ cần lúc khởi động, sau đó cứ dựa vào encoder ABZ mà xác định
trong mấy encoder này, em thấy có dây uvw của vị trí rotor
http://peetuvalkama.blogspot.com/201...vo-motors.html
b.r
Lần sửa cuối bởi nhatson, ngày 07-10-2014 lúc 01:40:28 PM.
Brushless motor loại sensorless khi khởi động nó lắc rotor mấy phát... xong sau khi nhận biết được vị trí của rotor rồi thì muốn quay kiểu nào nó cũng start được. Nếu nó start sai chiều.. nó sẽ sữa trong nháy mắt nên người dùng không để ý.. cứ nghĩ nó chạy phát ăn ngay.
Brushless motor loại sensor thì rất ít dùng nên không để ý. Có cái thằng này moment khởi động & gia tốc cực lớn...
DT: O7837277II - CKD's Youtube Channel - Facebook - Tổng hợp chủ đề
17 ds 3, Thạnh Mỹ Lợi, Q2, tp.HCM
sensorless vì giá thành , chất lượng cứ phải sensor
nhưng mà tiêu chí ngày càng phải dễ sử dũng, như panasonic đời mới em thấy encoder INRC cũng dùng serial tuốt , encoder có 4 dây, 2 nguồn, 2 data
cụ nào xài servo used ko nản vụ ngồi hàn dây encoder , dây control giơ tay
b.r
Con này của em:
Dùng với bộ điều khiển này của tàu, có thể dùng sensor hoặc sensorless. Nhưng đúng là dùng sensor tốc độ khởi động nhanh, êm.

 Quyền viết bài
Quyền viết bài



 Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫn