Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫnHehe, qua tau đi rồi test :P

 để chia sẻ bài viết lên facebook.
để chia sẻ bài viết lên facebook.


quá chuyên sâu em đứng hình , đọc thì đọc nhưng không hiểu heheh , bác gà con , nhat son , gà mờ , ckd cố gắng trao đổi sao mà làm ra được cái mạch chuyên dụng làm con động cơ đồng bộ quay tit mà không nóng phỏng tay là anh em mừng lắm à , em nghĩ sản phẩm này made in VN mà bán toàn cầu luôn chứ không chơi đâu ( miễn giá phải chắng là được)
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648

Hehe, qua tau đi rồi test :P
Lần sửa cuối bởi Gamo, ngày 16-06-2015 lúc 10:06:53 AM.
ở mục 2, chỗ lỏm ... đang là vấn đề cần giải quyết, nó ko phải dặc trưng của vector controlGửi bởi Ga con

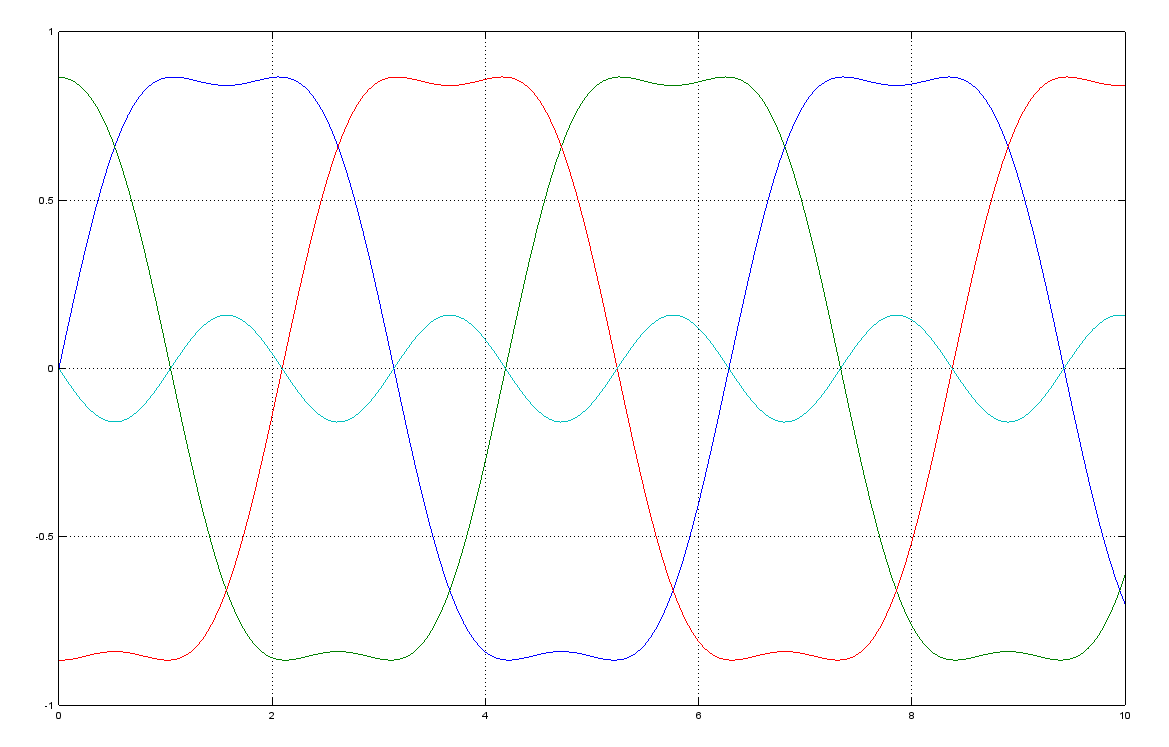
em cứ hiẻu đơn giản của dkhien FOC là tạo ra từ trường trên stator sao cho vuông góc với từ trường rotor
việc này dễ với động cơ dồng bộ có lõi bằng nam châm, từ trường của rotor đo vị trí của rotor là xong
việc này khó với động cơ ko đồng bộ, do từ trường của rotor được tạo ra bởi stator và nó.. chạy lung tung cả, FOC cần đầu tư cho việc nhận dạng tham số động cơ > nên vụ này em vứt xó
FOC sensorless cho động cơ đồng bộ giờ ko khó vì giá thành vật tư chấp nhận được, MCU thì đủ mạnh, còn lại là việc đo dòng thì có nhiều giải pháp
-hall current sensor cỡ 10usd
- linear opto
pan nữa là dùng ADC delta sigma

Lần sửa cuối bởi nhatson, ngày 16-06-2015 lúc 11:13:50 AM.
Ka ka, em chỉ thấy 2 cái nó khác nhau chỗ này thôi ợ, cơ bản về lực từ như anh nói, đành rằng không phải cái này là đặc trưng của vector control. Đọc tài liệu một số IC như TB6539 (hồi lâu e làm driver DC brushless cho cái ac spindle) nó cũng điều chế kiểu nầy dùng cho đồng bộ.
Ngày trước làm toàn làm sẵn cái bảng sine, tra hàng cột xuất PWM.
Làm openloop thì mấy món này là mới với e. Thôi quay về BLDC cho nó lành.
Thanks.
Nay vác đc cái kẹp BT15 về nhưng ko có áo, bác cao thủ nào đủ trình tiện cái áo ko ợ?
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.
mua từ con howa hả gorlak ? tiện cái vỏ cũng chua lắm , nguyên ống , 2 đầu gá bạc đạn , có taro lắp bích , mà dòng BT15 này hàng công nghiệp , nguyên bản thì runout <0.005mm , làm giống thế e là bất khả thi . Hình như BT15 này chỉ có 2 bạc 2 đầu thôi phải không ? Xài 7005C .
Bên tui đang có 1 bộ BT15 dạng rời , đầy đủ vỏ áo , muốn làm hay tham khảo qua tui cho mượn xem về làm đỡ nhức đầu.
Đề xuất vinamit làm đê , cái trước ảnh làm runout 0.006mm đó , cái cốt nó chuẩn thôi thì cái áo không lo nhiều.
Lần sửa cuối bởi Nam CNC, ngày 06-03-2017 lúc 09:36:27 AM.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648
Dự án atc built in
Du tính cuối tháng xong bộ này, chạy 10-15k thôi, chỉ sợ bạc ko chịu nổi, theo thông tin đầu này tối đa 15k rpm
E đú đởn vác nó về âm mưu, vì khoái con nhỏ nhỏ. Có alo bác Giang, hôm nào qua thọ giáo.
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.

Con này BT30 anh ơi, cho tự sướng 8k - 10k rpm là nó quất đủ nhu cầu phay rồi, spec hãng cũng tầm 8k rpm chứ kéo đai thì em e khó lên nổi 15k rpm. Em bất ngờ là con này nó tháo ra được, nhòm mini ku-te quá kaka
Cho thêm nguồn gốc em nó:

Lần sửa cuối bởi hung1706, ngày 06-03-2017 lúc 09:52:01 PM.
TPHCM - sdt 0907983682
https://www.facebook.com/CNCSP268/
Thi no ghi max 15k, a cung chi can 10-12k thoi
max 15K thì cứ phang 15 K nếu có giải nhiệt nước hay dầu chạy quanh thân , mấy cái rãnh xoắn nó dành cho chất giải nhiệt đó , nếu con này xài 7008C thì 15Krpm vẫn nằm trong giới hạn tốc độ vì 7008C max 17Krpm nếu dùng mỡ bò cao tốc , còn dùng mist oil thì còn cao hơn nữa , lúc đó 18K rpm là liên tục luôn đó , chỉ lo tốc độ cao thì cân bằng động vượt quá cấp cho phép thì nó rung.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648
Còn con 7005C thì tốc độ ra sao bác?
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.
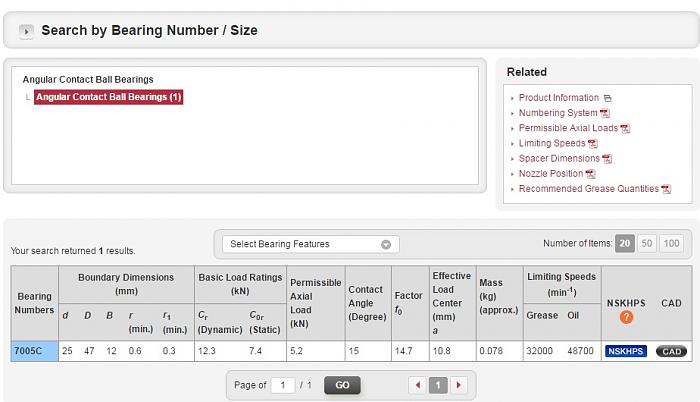
em tra tài liệu hãng NSK , có 2 bảng
loại 7005C thưởng thì 18000rpm cho mỡ cao tốc , 26000rpm cho mist oil
nếu là dòng super precision loại góc tiếp xúc 15 độ .
thì 7005C thì có tốc độ 32Krpm cho mỡ và 48Krpm cho mist oil
Nếu có cơ hội thì nên chọn hàng 2nd chắc chắn hàng xịn chánh hãng , và dòng đi theo spindle thì nó là super precision , còn mua hàng mới thì nó là dòng thông thường , có giá rẻ hơn và xác xuất chết với hàng copy china khá cao.
trên bạc cho spindle thông thường em mua 2nd ngoài chữ 7005C nó còn có thêm SUL P5 hay P4 , còn vành giữ bi nếu nó là phíp đỏ là hàng cao cấp nhất cho vành giữ bi , đa số là loại nhựa tổng hợp.
Nguyễn Hoàng Nam
n_h_n2002@yahoo.com DT: 0908415648
Của e là phíp đỏ ah, nhưng ko thấy chỗ nào ghi 7005C, e nghe bác MINHAT bảo vậy thôi
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.
hehe chưa kịp gì hết là anh Nam tư vấn rồi. Hoy em lại nhờ trợ lí vại. Các bác muốn tra mã gì thì bấm vô đây nhá.
http://www.jp.nsk.com/app02/NSKOnlin...Min=&widthMax=
TPHCM - sdt 0907983682
https://www.facebook.com/CNCSP268/
Vậy là ko phải rồi, loại 7005C như trên bác hung1706 nói kích thước ko giống của cây bt15, cái bt15 kích thước bên trong hình như 32, bên ngoài 55.
Mã e mới coi là NTN506, BNT006 GNP4
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.

Thấy tình hình này ae ôm nhiều con về mà cần phải bảo trì spindle quá. Có nên nhập Mỡ con bò Cao tốc ISOFLEX NBU 15 chính hãng về đưa anh Nam phân phối cho a/e không đây hehe. Hàng xịn không hiếm, chỉ hiếm người biết dùng.
Lần sửa cuối bởi Mechanic, ngày 07-03-2017 lúc 09:00:28 PM.
Số Điện Thoại : O92.4O5.2529 - TPHCM
Bạn xem kỹ chưa chứ bữa mình lấy 1 cặp 7005c nghe thằng rã máy nó nói là của cái bt15 mà mình cũng thấy có 1 đầu bt15 ngay đó
E tháo nó ra vệ sinh nhưng ngó cả 2 mặt ko thấy chỗ nào ghi 7005C bác ah.
Thông tin tra như bác hung1706 đưa ko trùng với loại có trên đầu BT15, đường kính ngoài OD của con 7005c nhỏ hơn nhiều so với con trên đầu BT15. Còn mã thì e có ghi ở trên đó, e ko rành mấy cái bạc đạn lắm.
Lần sửa cuối bởi GORLAK, ngày 08-03-2017 lúc 09:37:23 AM.
Liên hệ: 0907 217 485 - Gia công CNC nhỏ lẻ.
Cắt - khắc laser Fiber - CO2.
 Quyền viết bài
Quyền viết bài
 . Motor nó nhìn giống hệt pana trắng, nhưng phản hồi chỉ có hall thôi.
. Motor nó nhìn giống hệt pana trắng, nhưng phản hồi chỉ có hall thôi.